当前位置:网站首页>Lane change detection
Lane change detection
2020-11-06 01:28:00 【Artificial intelligence meets pioneer】
author |Hitesh Valecha compile |VK source |Towards Data Science

In this tutorial , We will learn how to use computer vision and image processing to detect whether a car is changing lanes on the road .
You must have heard of using Opencv haar cascade Can detect faces 、 Eyes or cars 、 Things like buses ? This time, let's use this simple detection method to build something cool .
1. Data sets
In this tutorial , Video files of cars on the road are used as data sets . Besides , We can use images in the data set to detect vehicles , But here, , When the traffic changes lanes , We'll use pop-up windows to alert , So for the dynamic information , Video input is more feasible .
2. Input
We use OpenCV Of haar cascade To detect the coordinates of the car , The input is a video file of a car on the road
cascade_src = 'cascade/cars.xml'
video_src = 'dataset/cars.mp4'
cap = cv2.VideoCapture(video_src)
car_cascade = cv2.CascadeClassifier(cascade_src)
cv2.VideoCapture() Method is used to capture the input video , A video is usually per second 25 Frame image (fps). After capturing the input , Loop extraction frames , And make use of haar cascade testing , Draw a rectangle around the car in the loop , To achieve consistency , Perform other operations on the captured frame at the same time .
while(1):
# Get every frame
_, frame = cap.read()
cars = car_cascade.detectMultiScale(frame, 1.1, 1)
for (x,y,w,h) in cars:
roi = cv2.rectangle(frame,(x,y),(x+w,y+h),(0,0,255),2) # Region of interest
stay OpenCV Use in BGR instead of RGB, therefore (0,0,255) A red rectangle will be drawn on the car , Not blue .

3. The image processing
We use frames , But if the frame resolution is very high , It will slow down the execution of the operation , Besides , Frames contain noise , You can use blur to reduce , Here we use Gaussian Blur .
Now? , Let's look at some of the concepts of image processing
3.1 HSV frame
In this article , We use from cv2.VideoCapture() Capture in the frame HSV frame , Highlight only the point where the vehicle is turning , And cover the rest of the road and the vehicles that are going straight on the road . Set the upper and lower limits to define HSV Color range in , To see where the car changed lanes , And used as a mask for frames . Here is a snippet of code to get this information -
# Using blur to eliminate noise in video frames
frame = cv2.GaussianBlur(frame,(21,21),0)
# transformation BGR To HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# stay HSV Define the color range in , To see where the vehicle changes angle
lower_limit = np.array([0,150,150])
upper_limit = np.array([10,255,255])
# HSV Image limit threshold
mask = cv2.inRange(hsv, lower_limit, upper_limit)
3.2 Corrosion and expansion
Corrosion and dilation are two basic morphological operations for image processing . The erosion operator has a local minimum effect on the region of the kernel function , Kernel functions are templates or masks . Corrosion is used to reduce speckle noise in images . Dilation is the convolution of image and kernel , It has the function of local maximum operator . When a pixel is added to the edge of a smooth object in the image , Apply inflation to recover some lost areas .
from HSV The mask generated in the first step of the frame is now operated with basic morphology ( Corrosion and expansion ) To deal with it . The generated frame is obtained by bitwise sum between the frame and mask ROI( Region of interest ).
kernel = np.ones((3,3),np.uint8)
kernel_lg = np.ones((15,15),np.uint8)
# Image processing technology known as corrosion is used to reduce noise
mask = cv2.erode(mask,kernel,iterations = 1)
# Image processing technology called dilation , To recover some of the lost areas
mask = cv2.dilate(mask,kernel_lg,iterations = 1)
# Except for areas of interest , Everything else turns black
result = cv2.bitwise_and(frame,frame, mask= mask)
3.3 Lane detection
utilize canny Edge detection operators combine Hough Lane change for lane detection .

# Lane detection
def canny(frame):
gray=cv2.cvtColor(frame,cv2.COLOR_RGB2GRAY)
blur=cv2.GaussianBlur(gray,(5,5),0)
canny=cv2.Canny(blur,50,150)
return canny
def region_of_interest(frame):
height=frame.shape[0]
polygons=np.array([
[(0,height),(500,0),(800,0),(1300,550),(1100,height)]
])
mask=np.zeros_like(frame)
cv2.fillPoly(mask,polygons,255)
masked_image=cv2.bitwise_and(frame,mask)
return masked_image
def display_lines(frame,lines):
line_image=np.zeros_like(frame)
if lines is not None:
for line in lines:
x1,y1,x2,y2=line.reshape(4)
cv2.line(line_image, (x1, y1), (x2, y2), (0, 255, 0), 3)
return line_image
lane_image=np.copy(frame)
canny=canny(lane_image)
cropped_image=region_of_interest(canny)
lines=cv2.HoughLinesP(cropped_image,2,np.pi/180,100,np.array([]),minLineLength=5,maxLineGap=300)
line_image=display_lines(lane_image,lines)
frame=cv2.addWeighted(lane_image,0.8,line_image,1,1)
cv2.imshow('video', frame)
4. contour
canny Edge detector and other algorithms are used to find edge boundaries in edge pixel images , But it doesn't tell us how to find points and edges where objects or entities can't combine , Here we can use OpenCV Realized cv2.findContours() As a concept of outline .
Definition -“ The outline represents a list of the points of the curve in the image .”
The outline is represented by a sequence , Each sequence encodes the location of the next point . We are roi Run many times in the cv2.findConteurs() To get the entity , And then use cv2.drawContours() Draw the outline area . The outline can be a dot 、 edge 、 Polygon, etc , So when you draw a contour line , We do polygonal approximation , Find the length of the edge and the area of the region .
function cv2.drawContours() It works by drawing a tree from the root node ( data structure ), And then connect the following points 、 Bounding box and Freeman Chain code .
thresh = mask
contours, hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# Define the minimum area of the contour ( Ignore min All values below )
min_area = 1000
cont_filtered = []
# Filter out all contours below the minimum area
for cont in contours:
if cv2.contourArea(cont) > min_area:
cont_filtered.append(cont)
cnt = cont_filtered[0]
# Draw a rectangle around the outline
rect = cv2.minAreaRect(cnt)
box = cv2.boxPoints(rect)
box = np.int0(box)
cv2.drawContours(frame,[box],0,(0,0,255),2)
rows,cols = thresh.shape[:2]
[vx,vy,x,y] = cv2.fitLine(cnt, cv2.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
cv2.line(frame,(cols-1,righty),(0,lefty),(0,255,0),2)
Another important task after finding the contours is to match them . Matching contours means that we have two independent computational contours to compare with each other , Or have a profile compared to an abstract template .
5. Characteristic moment
We can compare two contours by calculating contour moments .“ The characteristic of the total contour is the moment , Calculate by adding all the pixels of the contour .”
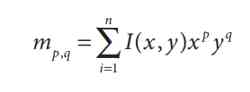
Torque type
Space characteristic moment :m00, m10, m01, m20, m11, m02, m30, m21, m12, m03.
Central characteristic moment :mu20, mu11, mu02, mu30, mu21, mu12, mu03.
Hu Characteristic moment : There are seven Hu Characteristic moment (h0-h6) or (h1-h7), Both symbols use .
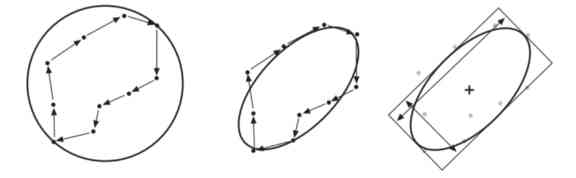
We use cv2.fitEllipse() Calculate the characteristic moment and fit the ellipse on the point . Find the angle from the contour line and the feature moment , Because changing lanes requires 45 Degree of rotation , This is seen as the threshold for the car's turning angle .
M = cv2.moments(cnt)
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
(x,y),(MA,ma),angle = cv2.fitEllipse(cnt)
print('x= ', cx, ' y= ', cy, ' angle = ', round(rect[2],2))
if(round(rect[2],2))<-45:
# print('Lane change detected')
popupmsg('Lane change detected')
Now? , We can use Tkinter To create a simple pop-up window to warn of changes , It's not just about printing the change detection results .
if(round(rect[2],2))<-45:
popupmsg('Lane change detected')
def popupmsg(msg):
popup = tk.Tk()
popup.wm_title("Message")
label = ttk.Label(popup, text=msg, font=NORM_FONT)
label.pack(side="top", fill="x", pady=10)
B1 = ttk.Button(popup, text="Okay", command = popup.destroy)
B1.pack()
popup.mainloop()

Draw a rectangle on the frame , Measure the angle with a green line


6. Summary and future
In this tutorial , Will use lane change detection method to explore a small demonstration of smart car navigation .
Computer vision is developing rapidly , It's not only used in local car navigation , And there's progress in navigation and product testing on Mars , Even in medical applications it is being developed and used in the early days of X Cancer and tumor detection in X-ray images .
Click here to get GitHub The source code of the account :https://github.com/Hitesh-Valecha/Car_Opencv
reference
- Bradski, Gary and Kaehler, Adrian, Learning OpenCV: Computer Vision in C++ with the OpenCV Library, O’Reilly Media, Inc., 2nd edition, 2013, @10.5555/2523356, ISBN — 1449314651.
- Laganiere, Robert, OpenCV Computer Vision Application Programming Cookbook, Packt Publishing, 2nd edition, 2014, @10.5555/2692691, ISBN — 1782161481.
Link to the original text :https://towardsdatascience.com/lane-change-detection-computer-vision-at-next-stage-914973f96f4b
Welcome to join us AI Blog station : http://panchuang.net/
sklearn Machine learning Chinese official documents : http://sklearn123.com/
Welcome to pay attention to pan Chuang blog resource summary station : http://docs.panchuang.net/
版权声明
本文为[Artificial intelligence meets pioneer]所创,转载请带上原文链接,感谢
边栏推荐
- Recommendation system based on deep learning
- ES6 essence:
- Linked blocking Queue Analysis of blocking queue
- What is the difference between data scientists and machine learning engineers? - kdnuggets
- Interface pressure test: installation, use and instruction of siege pressure test
- Skywalking series blog 1 - install stand-alone skywalking
- Mac installation hanlp, and win installation and use
- The data of pandas was scrambled and the training machine and testing machine set were selected
- How to encapsulate distributed locks more elegantly
- use Asponse.Words Working with word templates
猜你喜欢
Brief introduction and advantages and disadvantages of deepwalk model

JVM memory area and garbage collection

ipfs正舵者Filecoin落地正当时 FIL币价格破千来了
ES6学习笔记(五):轻松了解ES6的内置扩展对象
小程序入门到精通(二):了解小程序开发4个重要文件
Aprelu: cross border application, adaptive relu | IEEE tie 2020 for machine fault detection
With the advent of tensorflow 2.0, can pytoch still shake the status of big brother?

Brief introduction of TF flags
Arrangement of basic knowledge points
多机器人行情共享解决方案
随机推荐
The road of C + + Learning: from introduction to mastery
NLP model Bert: from introduction to mastery (2)
JVM memory area and garbage collection
华为云“四个可靠”的方法论
Architecture article collection
TRON智能钱包PHP开发包【零TRX归集】
2019年的一个小目标,成为csdn的博客专家,纪念一下
How to become a data scientist? - kdnuggets
每个前端工程师都应该懂的前端性能优化总结:
Brief introduction of TF flags
Python基础数据类型——tuple浅析
Python3 e-learning case 4: writing web proxy
Network security engineer Demo: the original * * is to get your computer administrator rights! 【***】
Network security engineer Demo: the original * * is to get your computer administrator rights! 【***】
What to do if you are squeezed by old programmers? I don't want to quit
I've been rejected by the product manager. Why don't you know
Windows 10 tensorflow (2) regression analysis of principles, deep learning framework (gradient descent method to solve regression parameters)
After reading this article, I understand a lot of webpack scaffolding
6.1.1 handlermapping mapping processor (1) (in-depth analysis of SSM and project practice)
Pattern matching: The gestalt approach一种序列的文本相似度方法