当前位置:网站首页>[quick start tutorial 2] crazy shell · open source formation UAV - Introduction to hardware resources
[quick start tutorial 2] crazy shell · open source formation UAV - Introduction to hardware resources
2022-07-20 21:10:00 【efans_ Mike】
Crazy shell · Open source formation UAV
Introduction to hardware resources
The hardware is mainly composed of three parts , They are unmanned aerial vehicles 、 Remote control handle and cocobit Programming board .
2.1 Introduction to UAV
The complete UAV is shown in the figure below .

chart 1
The main core of UAV is ARM Cortex-M3 High performance single chip microcomputer with kernel —— Italian semiconductor STM32F103CBT6, Main frequency up to 72MHz、RAM the height is 20kByte、Flash the height is 128kByte.
The top of the UAV RGB The lantern box contains icm20602( Six axis sensors )+SPL06( barometer ) Composed of IMU unit ( Inertial measurement unit ) and WS2812 Of RGB Lantern unit .
The drone motherboard is made of four layers of gold sinking high-quality fiberglass , On the mainboard of the UAV, there are not only STM32F103CBT6 The main core , It also carries two chips AO9926C double N Ditch MOS As the driving unit of UAV motor , In addition, the motherboard also integrates NRF24L01 2.4G Transceiver chip , As the communication unit of UAV , There is also TC4056 As power management chip , For charging management of UAV .
The main board of the UAV is fixed on the carbon fiber bracket by screws , The four corners of the carbon fiber support are placed with four big power 8520 Hollow cup motor ,8520 The hollow cup motor is connected with four ABS High toughness rotor .
Below the carbon fiber bracket is the battery slot , Below the battery slot is the optical flow module 、 Vision module and laser module 2 individual ( One of them is reserved , It can be used to avoid obstacles ).
The interfaces on the UAV motherboard are shown in the figure below .

chart 2
The objects under the rack are shown in the following figure .

chart 3
At the same time, there are aerial photography versions of drones , Support wireless image transmission and APP control . As shown in the following table , It is the description of each interface on the UAV motherboard .
Description of each interface of UAV

chart 4

chart 5
2.2 Introduction to remote control handle
The remote control handle of UAV is also an important part of the whole flight control system , The remote control handle adopts ergonomic shape , use FR-4 Gold sinking process ; The main core of the remote control handle is ARM Cortex M3 High performance single chip microcomputer with kernel —— Italian semiconductor STM32F103C8T6, Main frequency up to 72MHz、RAM the height is 20KByte、Flash the height is 64KByte.
The remote control handle is not only equipped with a high-performance main core STM32, There are also high-quality safe power management chips TC4056, Like the drone motherboard, it can pass USB Port to charge the battery , The charging state is fed back through the indicator ; Above the main core is the power enhanced 2.4G Transceiver module , Support ultra long distance data transmission ; Both ends of the remote control handle are rocker bars, which can be used to control the UAV , Below the left rocker is “ Programming model ” Key , coordination cocobit Programming board , It can realize autonomous cruise of UAV . Below the right rocker is “ Emergency stop ” Self locking button , Realize the emergency stop and landing of UAV . The figure below shows the overall schematic diagram of the UAV remote control handle .

chart 6
The functions of each unit are shown in the following table :
Handle function

chart 7

chart 8
OLED The menu display and its function operation are shown in the following table .
OLED Menu display and function operation instructions

chart 9
chart 10

chart 11
The common functions of remote control are shown in the table below .
How to use common functions of remote control

chart 12

chart 13

chart 14

chart 15

chart 16

chart 17
2.3cocobit Introduction to programming board
Shell shell plate (cocobit) It is a graphic programming hardware board designed by crazy shell team for teenagers , Only credit card size . Shell shell plate (cocobit) Support graphical drag and drop programming , Users can drag and drop logical blocks through the upper computer software , The upper computer software can automatically convert the logic block dragged by the user into the corresponding C Language code and compiled into executable hex file .
Shell shell plate (cocobit) Although it looks like a small hardware board , But it supports rich hardware expansion , such as : take cocobit As the core of the brain, the programming machine car / Programming electronic building blocks / Programming robot / Programming drones and so on . ad locum , We will cocobit Insert the hardware board into the remote control , adopt cocobit Graphical programming software , The aircraft can be programmed to fly autonomously , Let the plane fly according to our planned route .
cocobit Adopt high quality FR-4 Sunken gold black oil material , Carrying Atmel The company's 8 Bit high performance chip ATmega328P as well as Dialog The company's high-performance and the lowest power consumption in the world BLE SOC chip DA14580 Dual core , Support bluetooth 4.0. meanwhile cocobit Also carry the 6 Shaft sensor MPU6050, stay cocobit The other side of is also integrated 7*7 Of LED Dot matrix and four buttons ,cocobit Use gold fingers to lead out common interfaces , Cooperating with the host computer and external resources, it can perfectly realize many experiments of physical programming in Engineering Physics . As shown in the figure below cocobit Front view of 、 Reverse view .

chart 18

chart 19
As shown in the figure below cocobit Upper computer interface .

chart 20
More information can be found at cocobit Official website :https://www.cocobit.net understand .
More complete learning materials and corresponding open source Suites , Please visit the official website :“ Crazy shell ”
For customized development , Please use the official website “ Crazy shell ” At the bottom of the page “ Contact us ” Make contact
边栏推荐
- Introduction and use cases of iterator
- 远程登陆----radius认证
- 我将maxcomputer的数据同步到mysql是通过数据集成吧,我同步任务成功了,但是mysql里
- 通信开销:限制RedisCluster规模的关键因素
- pytest+yaml框架环境配置和使用教程
- AUTOSAR从入门到精通100讲(105)-功能安全之AUTOSAR Timing的保护机制
- 《Reinforcement based mobile robot navigation in dynamic environment》翻译
- 【文献笔记】PointMLP
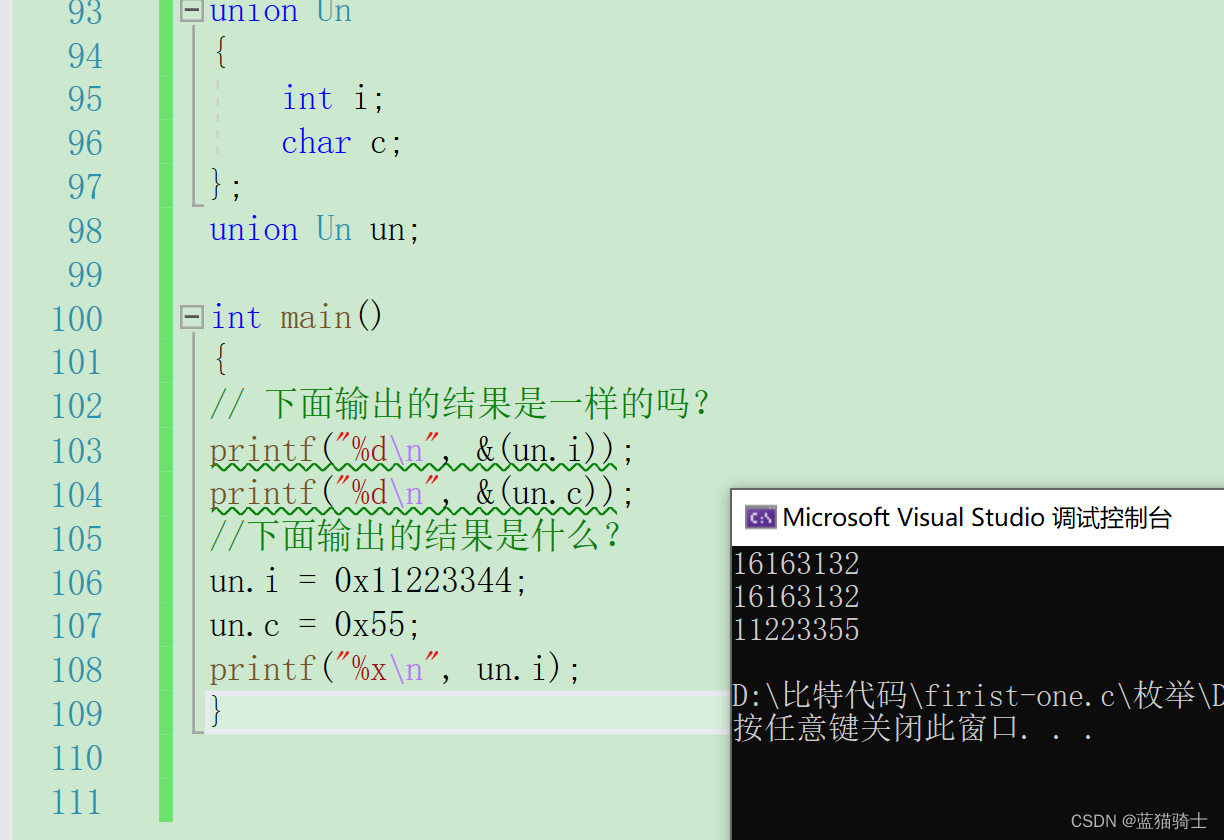
- Enumeration Union
- [combinational logic circuit] - display decoder
猜你喜欢








随机推荐
Arrays.sort()自定义比较函数
Mysql基础学习Day06
生成器的使用原则及方法以及利用生成器实现简易项目(内含详细解说传参问题)
山西省第二届网络安全技能大赛(企业组)部分赛题WP(五)
ES6——Array对象的方法和扩展、数组的遍历 、string的扩展方法
如何保障 MySQL 和 Redis 的数据一致性?
Overview | comprehensive comparative research on image denoising
深度遍历:统计最高分的节点数目
cookie增删改查和异常
ICML2022 | XAI for Transformers:通过保守传播更好的解释
Data distribution optimization: how to deal with data skew?
金融×元宇宙:虚实交融共进下的金融体系
Hello, excuse me, the source system of the data integration job is SQLSEVER, and the table name is a keyword, which needs to be added in the sqlserver library
Wsl2 installation tutorial and modifying the default installation directory to other disks
这 20 道 Redis 经典面试题你还不会,就别去面试了!
风格迁移篇--CCPL:Contrastive Coherence Preserving Loss for Versatile Style Transfer多功能风格转换的对比连贯保持损失
ffmpeg下载与安装
103. (cesium chapter) cesium honeycomb diagram (square)
Wechat applet map call (quick learning)
NFT access tool premint was hacked, with a loss of more than 370000 US dollars