当前位置:网站首页>[initial exploration of STK] create a track to the moon
[initial exploration of STK] create a track to the moon
2022-07-22 16:24:00 【An qianrou】
One 、 Basic knowledge of
1.1 Create or copy a 3D or 2D View

Change the thickness of the track line
2d Graphics --> Attributes --> more

1.2 Create a new satellite
1. Create a new scene , Name it earth2moon
2. Create a satellite , Method :Insert -- New -- Satellite(orbit wizard)
Two 、 Mission requirements
Launch the satellite from Wenchang launch site , After being ignited on the berthing track , after 5 It takes days to reach the height near the moon 200km Polar orbit circumlunar orbit .
3、 ... and 、 Create a process
【 notes 】 stay Satellite1 Of Properties By configuring Astrogator Conduct track design ( Right click --Properties)
3.1 Get near the moon
Target Sequence The configuration is as follows
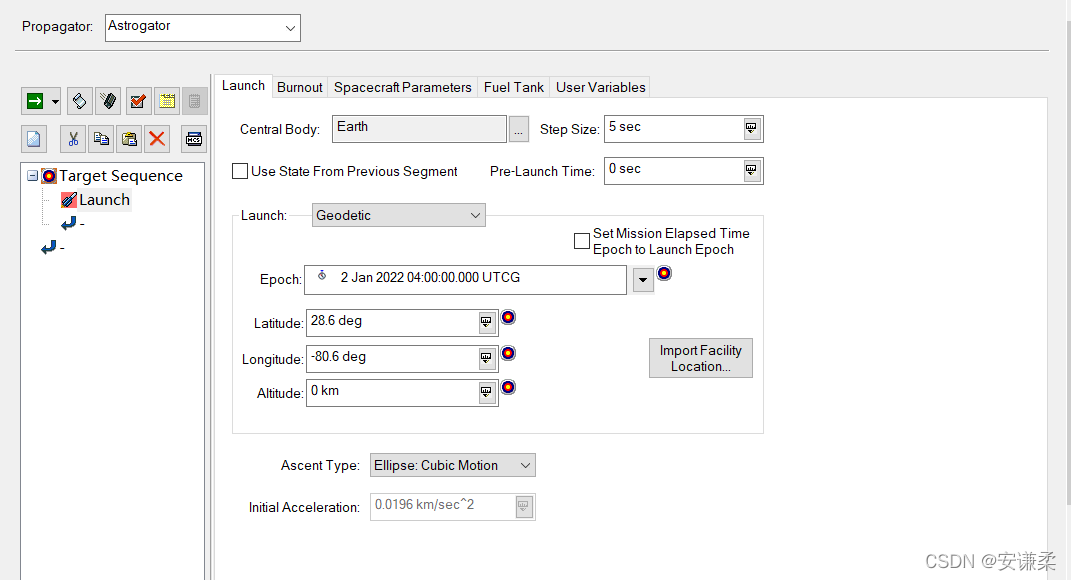
(1) launch --Launch
modify Epoch etc. .
(2) Berthing section --Propagate, Name it Coast
Set the berthing time :3000 second .

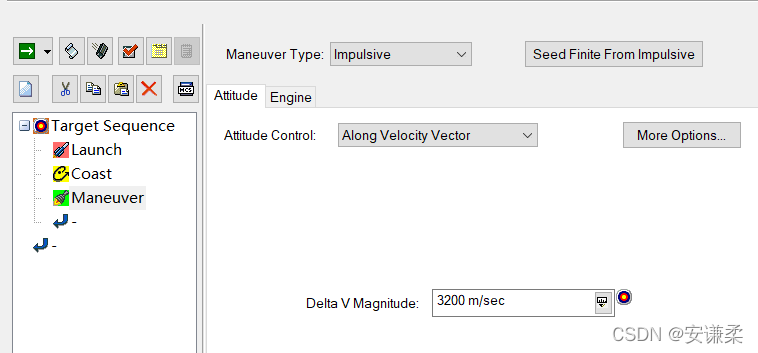
(3) Flying to the moon --Maneuver
Here the thrust uses pulses . Set up  , Generally along the direction of speed . perhaps VCN Coordinate system , Along the x Set the axis . Specific values can be found in the literature , Let's see how much it takes for a general lunar orbit , Generally greater than 3000 m/sec.
, Generally along the direction of speed . perhaps VCN Coordinate system , Along the x Set the axis . Specific values can be found in the literature , Let's see how much it takes for a general lunar orbit , Generally greater than 3000 m/sec.
(4) Propogate
Stop sign 1: Hit the moon and stop . Set the distance from the moon to 0km.

If you can't hit the moon , Stop sign 2: Stop at the point near the moon .

here , Run the entire sequence , You may find that the moon is not far away , Then it's near the moon , It stopped . however , At this time, it is actually far away from the moon , Still near the earth . In this case, it is impossible to get a feasible solution . therefore , Add a condition ( Set the distance between the satellite and the earth 30000km), Ensure that the extrapolation is far enough , To the moon .

Running the whole sequence, I found that there was no rush to the moon . here , We need to change the orientation and position of the space of the lunar orbit . Because it controls the launch time , The orbit to the moon will rotate along the earth's rotation axis . Modify the berthing time , The lunar orbit will rotate along the normal axis of the mooring orbit . therefore , The right ascension of the ascending node needs to be modified by the launch time  + Modify the perigee angle according to the berthing time
+ Modify the perigee angle according to the berthing time  . Check these two design variables .
. Check these two design variables .

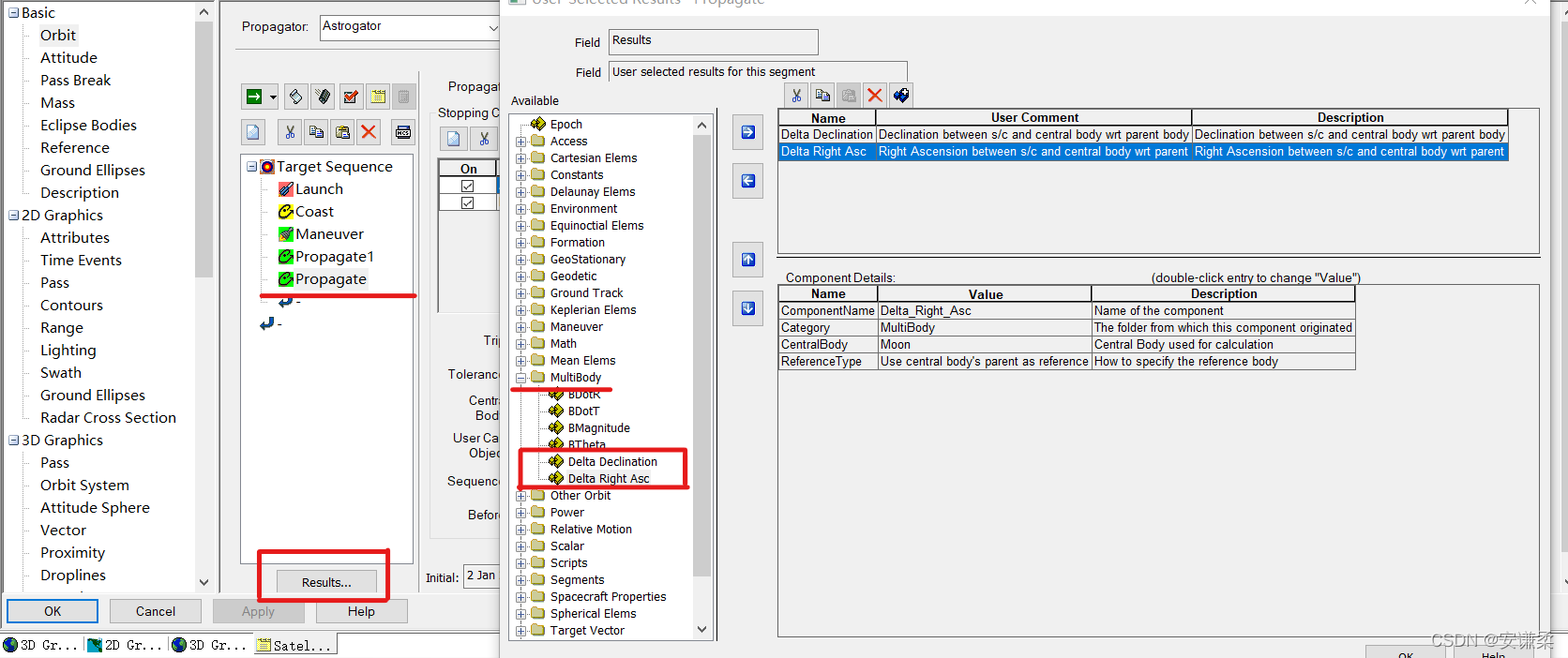
How to describe constraints ? The satellite's right ascension and declination coincide with the moon . In particular , The target variable is Delta Declination (Declination between s/c and central body wrt parent body) and Delta Right Asc (Right Ascension between s/c and central body wrt parent body, These two quantities are the difference between the satellite's declination and right ascension relative to the earth and the moon's declination and right ascension relative to the earth .
Based on the above analysis , Now let's start configuring the differential solver .(Target Sequence--Differential Corrector)
(1) Design variables ( Control variables )


(2) Design objectives
Scaling Is to normalize , Both numerical integral and differential corrections need normalization , It will be easier to solve ( convergence ).

Be careful :Target Sequence Inside Action choice Run active profiles. Click on the run .
give the result as follows

Come here , The goal of reaching the moon has been achieved .
3.2 Rough design of parameters near the lunar surface
The following is for the height of the perilunar point , dip angle , The flight time is designed .
First , Adjust the inclination .
B Plane is very important in deep space design, especially in the process of gravity assisted orbit transfer . Near small celestial bodies , Relatively small bodies have hyperbolic orbits . The axis passing through the rotation axis and the equator constitute B Plane . The asymptote of hyperbola passes through B The point of the plane is formed by the components of the two axes BDotT and BDotR. The control target of inclination is (Propagate --> Results --> MultiBody) in BDotT and BDotR Definition , It's easier to converge . Because using asymptotes to describe nonlinearity and sensitivity will be much lower .
here , Add a design variable ( Control variables ). Pay attention to check .
Suppose the design is a polar orbit of the moon ,BDotR=8000,BDotT=0.

The specific design of the differential corrector is shown in the figure above , give the result as follows , Convergence is achieved .
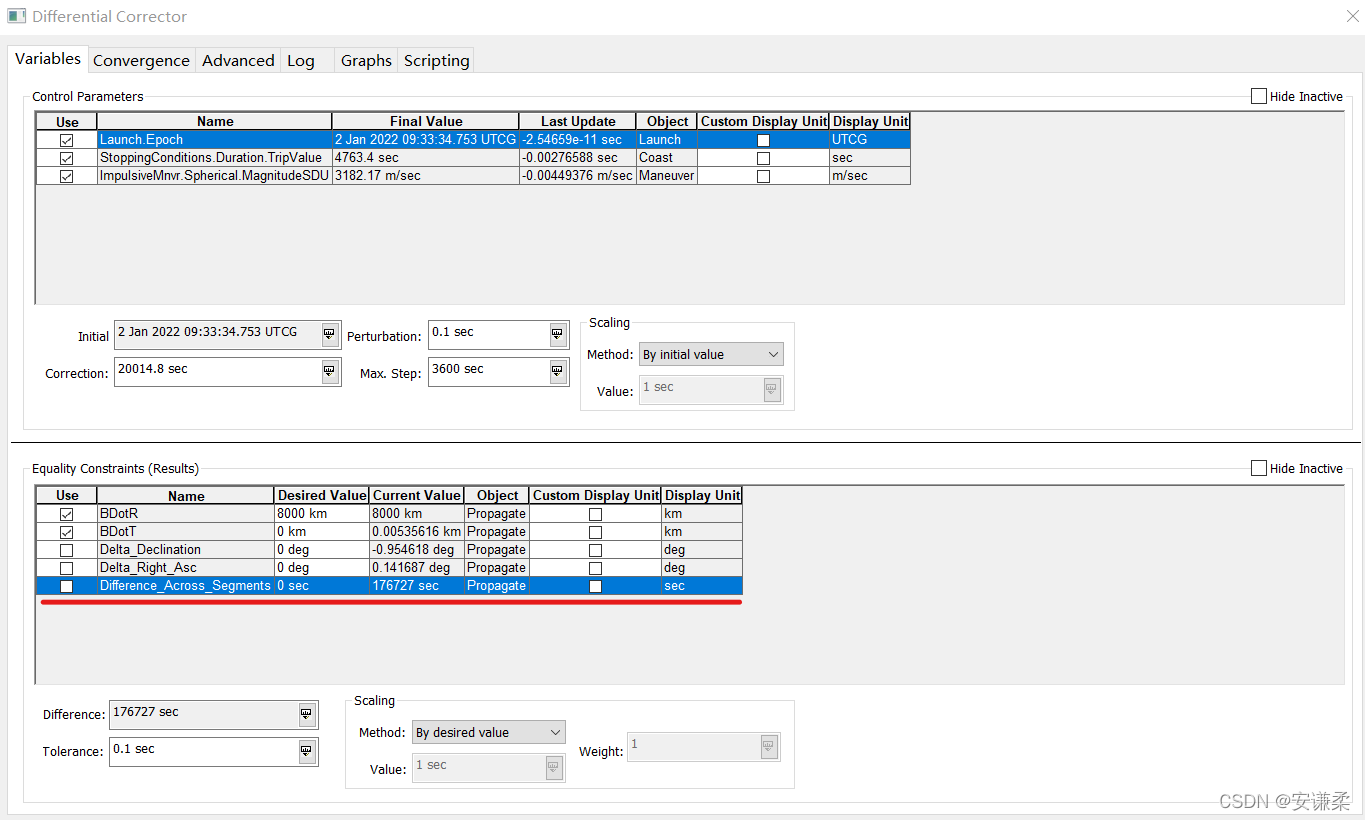
then , Adjust the flight time based on the above convergence . The flight time is Propagate --> Results --> Segments --> Difference Across Segments. It literally means to span the deviation between segments . here CalcObject Choice is Epoch,OtherSegment choice Target Sequence.Maneuver.
 When I'm done , It can be found that the current flight time is 176727s.
When I'm done , It can be found that the current flight time is 176727s.
 If you need to change the time to 5 God , That is to say 432000 second . Copy the above differential corrector , If you modify it directly , See the picture below .
If you need to change the time to 5 God , That is to say 432000 second . Copy the above differential corrector , If you modify it directly , See the picture below .

You will find no convergence :

At this time, the homotopy method is used , Gradually change to what you need 432000 Second flight time .


At present, the flight time has met the requirements , The inclination is basically very close to the requirements .
3.3 Precise design of parameters near the lunar surface
Next, the inclination and height are corrected in detail .
The inclination is Propagate --> Results --> Keplerian Elems --> Inclination. The coordinate system is the lunar system .


The height is at Geodetic --> Altitude, The central celestial body chooses the moon .
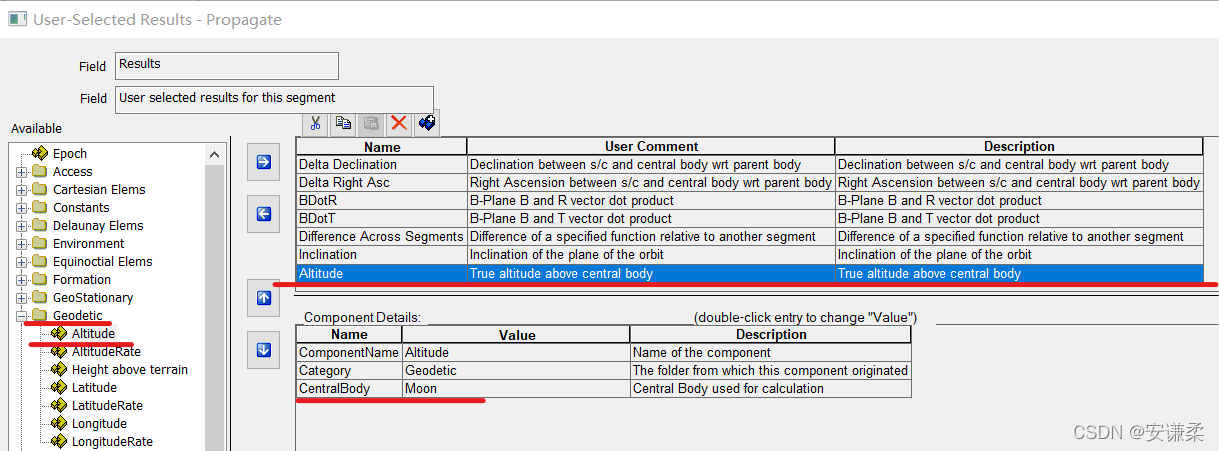
The constraint is the height of the perilunar point . Why? ? Because the satellite stopped near the moon ( Extrapolated stop condition ), So the constraint height means the height of the perihelion . We can see through B After the plane constrains the asymptote , The true inclination of the orbit at this time 83° about , It's close to 90° The requirements of . In this case , It will be easy to converge .
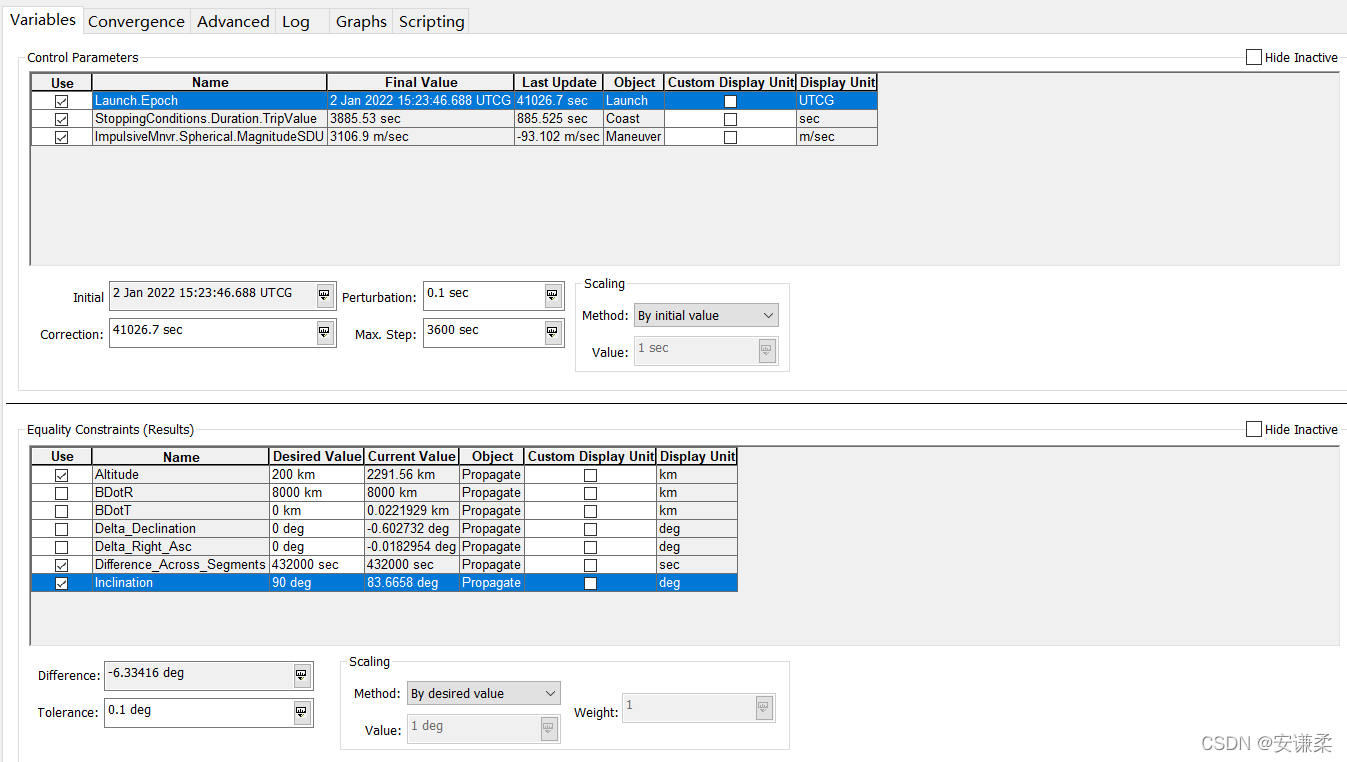
The operation results are as follows 
thus , The design task is completed !
边栏推荐
猜你喜欢

NFT 多样化的发行方式

信号FFT、STFT、小波变换、包络分析等

M using similink simulation module to realize dynamic simulation of multipath channel
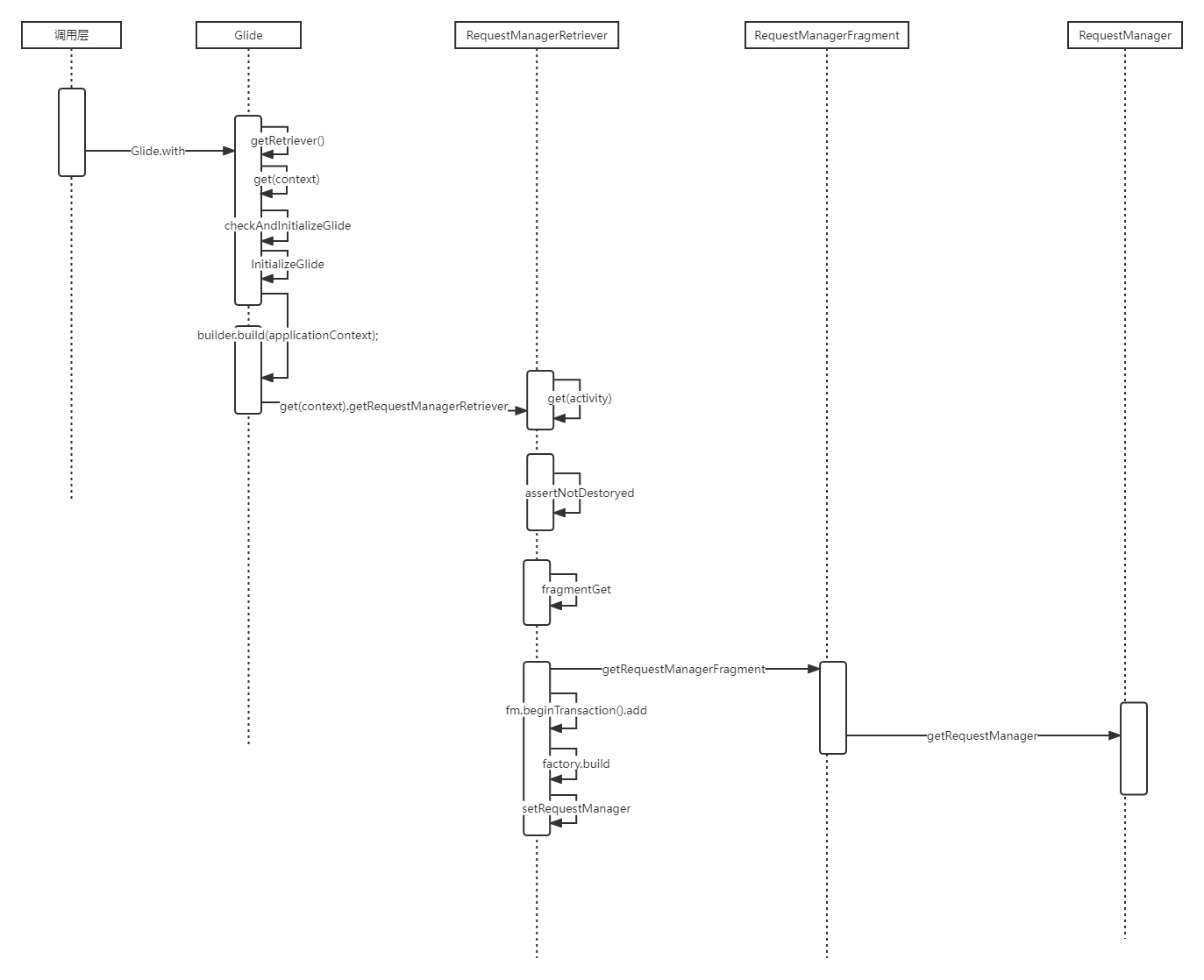
Glide 源码解析

Hello world of SOC

JVM内存模型:运行时数据区及线程

Classic books of Orthodontics

Hybrid hybrid development and jsbridge

Docker data management case - MySQL data persistence
![[unity project practice] game architecture](/img/5d/74283779596ae04611bc1f3d9f58a4.png)
[unity project practice] game architecture
随机推荐
JVM classic interview 20 questions
[elaborate] ES6's array expansion method, object expansion method, string expansion method Object level depth
SAP 电商云 Spartacus UI 客户系统的跨域请求
Docker data management case - MySQL data persistence
美化多位数字
NFT 交易所合约开发教程(Solidity & Hardhat)
The big problem of HA automatic failover (active) namenode
Alternet scripting, user interface design function
Matlab simulation of BER performance of BCH coding and decoding
网络层面试题
Lesson 3 shell syntax
C language pthread_ Join() function
[solution] solve the importerror: library "Glu" not found
【解决方案】解决paddlepaddle运行强化学习代码时TypeError: fc() got an unexpected keyword argument ‘is_test‘的错误
How does the red team play
字符编码问题
【解决方案】解决ImportError: Library “GLU“ not found.问题
M using similink simulation module to realize dynamic simulation of multipath channel
sftp创建
EasyCVR平台如何实现无需鉴权即可接入特殊设备?