当前位置:网站首页>[ROS] use of roslaunch
[ROS] use of roslaunch
2022-07-20 23:35:00 【qq_ twenty-nine million seven hundred and fifty thousand four h】
roslaunch Can be used to start the definition in launch Multiple nodes in the file . Its main functions include :
1 Start node
2 Start other launch file
3 Configuration parameters
4 Set the node
More detailed documents can be found in Click on or Click on
Here we mainly show how to use launch Start one or more nodes
launch The file is similar to xml The label language of
Preparation
About the following talker and listener file , You can refer to Get into
newly build launch Folder , Storage launch file 

Use roslaunch Start a node
launch The contents of the document :
<launch>
<node pkg="test_tutorials" name="talker" type="talker" output="screen" respawn="true"/>
</launch>
【 notes 】
pkg: The function package name of the node
type: The executable name of the node
name: The name of the node runtime
output=“log | screen” ( Optional ), Log sending destination , It can be set to log Log files , or screen The screen , The default is log
respawn=“true | false” ( Optional ), If the node exits , Whether to restart automatically
required=“true | false” ( Optional ), Whether the node must , If true, Then, if the node exits , Will kill the whole roslaunch
ns=“xxx” ( Optional ), In the specified namespace xxx Start node
machine=“ machine name ”, Start the node on the specified machine
args=“xxx xxx xxx” ( Optional ), Pass parameters to node
roslaunch test_tutorials test_begin.launch


It's obvious here , adopt roslaunch It starts a talker node , And through launch File start node , It's activated roscore+rosrun test_tutorials talker Combination of two commands , It's more convenient .
Use roslaunch Start two nodes ( At the same time to start talker and listener)
<launch>
<node pkg="test_tutorials" name="talker" type="talker" output="screen" respawn="true"/>
<node pkg="test_tutorials" name="listener" type="listener" output="screen" respawn="true"/>
</launch>

Using the calculation chart, you can see 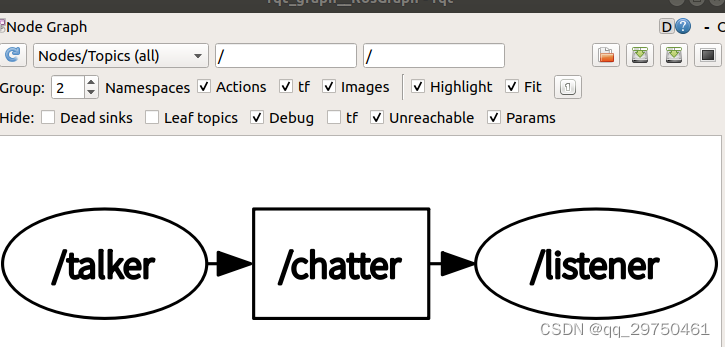
Use one launch File calls another launch file
Create a new one test_launch.launch file 
Enter the following
<launch>
<include file="$(find test_tutorials)/launch/test_begin.launch" />
</launch>
And then run
roslaunch test_tutorials test_launch.launch

Then... Is successfully opened test_begin.launch The content in 
``
边栏推荐
猜你喜欢

数组把key相同值,合并value值(整理)

VLAN再见,我选择用QinQ!1000字带你详细了解QinQ技术

Can we still buy in the bull market? 2021-04-09

RuntimeError: CUDA error: an illegal memory access was encountered
真的卷不动了...

bond网卡模式设置

《PyTorch深度学习实践》第八课导入数据
![微服务架构 | 链路追踪 - [Sleuth]](/img/64/dac51dc900e7f0bec5bf6f3782432e.png)
微服务架构 | 链路追踪 - [Sleuth]

Ali P8 posted the salary slip in January. It really pierced my heart after reading it
![[Yugong series] July 2022 go teaching course 013 constant, pointer](/img/cf/1c7db0a2d5e7c3888e6166f2fea1ee.png)
[Yugong series] July 2022 go teaching course 013 constant, pointer
随机推荐
bond网卡模式设置
力扣刷题每日一题
132天...从电子厂流水线走到了高薪程序员
.NET6之MiniAPI(五):选项
【文件上传】解析文本文件通过JDBC连接进行批处理入库(动态建表动态入库)
Microservice architecture | link tracking - [sleuth]
Analysis of QR code scanning and login in IM instant messaging development
There is still a lot of room for innovation in defi, and high-quality projects will appear in the future 2021-04-13
Kubernetes网络插件详解- Flannel篇
【云原生】 iVX 低代码开发 引入腾讯地图并在线预览
牛市还在,资金往头部集中是全球性规律 2021-04-04
微信小程序接入微信支付流程
C语言文件操作
Envoy monitoring management
JVM memory model
王者荣耀商城异地多活架构
【AXI】解读AXI协议的低功耗设计
ECCV 2022 | semantic novelty detection based on relational reasoning
数组常用方法
MoveIt2——7. 场景规划ROS API