当前位置:网站首页>Adjacency table of graph and its depth first (DFS) and breadth first (BFS) traversal
Adjacency table of graph and its depth first (DFS) and breadth first (BFS) traversal
2022-07-21 20:18:00 【Stewed radish】
Adjacency table of graph and its DFS、BFS Traverse
The adjacency table of graph is created
Adjacency table when the graph is sparse , namely Use when the edge is less than the square of the vertex
If it is a weighted network , Then add the corresponding weight field
#include<iostream>
using namespace std;
const int MAX = 20;
typedef char VertexType;// Vertex data type
// Side table node
struct EdgeNode
{
int adjvex;// Store information of other arcs , That is, the subscript of the corresponding vertex
EdgeNode* next;// Point to next
};
// Vertex table node
typedef struct VertexNode
{
VertexType data;// Data fields
EdgeNode* firstedge;// Pointer to the domain
}AdjList[MAX];
// chart
typedef struct Graph
{
AdjList adjlist;// Vertex array
int numVertexes, numEdges;// The number of points and the number of edges
}*GraphAdjList;
void creat(GraphAdjList& g)
{
g = new Graph;// Allocate space
int i, j, k;//for Recycle
cout << " Enter the number of vertices and edges \n";
cin >> g->numVertexes >> g->numEdges;
cout << " Enter vertex information \n";
for (i = 0; i < g->numVertexes; i++)
{
cin >> g->adjlist[i].data;
g->adjlist[i].firstedge = nullptr;// Initial empty
}
// Create side table information
cout << " Enter coordinates \n";
for (k = 0; k < g->numEdges; k++)
{
cin >> i >> j;// Represents his coordinates , Subscript from 0 Start
EdgeNode* q = new EdgeNode;// The first interpolation , If you use the tail interpolation method, you need to cycle to find the last node
q->adjvex = j;// Storage arc head
q->next = g->adjlist[i].firstedge;// You can know how to write the head inserting method by drawing and analyzing
g->adjlist[i].firstedge = q;
// When the graph is undirected , Continue with the following operations ; The directed graph is commented out below
// Undirected graph symmetric operation <i,j>,<j,i>
EdgeNode* p = new EdgeNode;
p->adjvex = i;
p->next = g->adjlist[j].firstedge;
g->adjlist[j].firstedge = p;
}
}
Adjacent to the watch DFS Traverse
The time complexity is O(n+e), The space complexity is O(n), That is, the cost of stack
It is similar to the preorder traversal of a tree
It is worth noting that , A graph may be unconnected , One traverse cannot access all vertices , So there's more DFSGraphAdjList Function to ensure that all vertices can be traversed
void DFS(GraphAdjList g, int *visited,int adjvex)
{
if (!g)
return;
visited[adjvex] = 1;
cout << g->adjlist[adjvex].data;
EdgeNode* p = g->adjlist[adjvex].firstedge;// Get the current vertex pointer
while (p)
{
if (!visited[p->adjvex])// Recursion without access
DFS(g,visited, p->adjvex);
p = p->next;// Otherwise, go to the next adjacent path
}
}
void DFSGraphAdjList(GraphAdjList g)
{
int *visited = new int[g->numVertexes];
for (int i = 0; i < g->numVertexes; i++)// initialization
visited[i] = 0;
for (int i = 0; i < g->numVertexes; i++)// Both connected and disconnected graphs can access
if (!visited[i])
DFS(g, visited, i);
}
Adjacent to the watch BFS Traverse
It is similar to the sequence traversal of trees , You need to complete with the help of queues
Here we manually construct a simple circular queue
void BFS(GraphAdjList g, int* visited,int adjvex)
{
if (!g)
return;
int queue[MAX], front=-1, rear=-1;// Construct a circular queue
cout << g->adjlist[adjvex].data;
visited[adjvex] = 1;
rear = (++rear) % MAX;// If you go out and join the team, you should add yourself first 1 Modulus array maximum , Make the most of space
queue[rear] = adjvex;
while (front != rear)// The queue is not empty
{
front = (++front) % MAX;// Leave the team to save
int temp = queue[front];
EdgeNode* q = g->adjlist[temp].firstedge;// Get the current vertex pointer
while (q)// Non space-time cycle
{
if (!visited[q->adjvex])// If not accessed
{
visited[q->adjvex] = 1;// Mark the output and then join the team
cout << g->adjlist[q->adjvex].data;
rear = (++rear) % MAX;
queue[rear] = q->adjvex;
}
q = q->next;// Otherwise, go to the next adjacent path
}
}
}
void BFSGraphAdjList(GraphAdjList g)
{
int* visited = new int[g->numVertexes];
for (int i = 0; i < g->numVertexes; i++)// initialization
visited[i] = 0;
for (int i = 0; i < g->numVertexes; i++)// Both connected and disconnected graphs can access
if (!visited[i])
BFS(g, visited, i);
}
Complete code
#include<iostream>
using namespace std;
const int MAX = 20;
typedef char VertexType;// Vertex data type
// Side table node
struct EdgeNode
{
int adjvex;// Store information of other arcs , That is, the subscript of the corresponding vertex
EdgeNode* next;// Point to next
};
// Vertex table node
typedef struct VertexNode
{
VertexType data;// Data fields
EdgeNode* firstedge;// Pointer to the domain
}AdjList[MAX];
// chart
typedef struct Graph
{
AdjList adjlist;// Vertex array
int numVertexes, numEdges;// The number of points and the number of edges
}*GraphAdjList;
void creat(GraphAdjList& g)
{
g = new Graph;// Allocate space
int i, j, k;//for Recycle
cout << " Enter the number of vertices and edges \n";
cin >> g->numVertexes >> g->numEdges;
cout << " Enter vertex information \n";
for (i = 0; i < g->numVertexes; i++)
{
cin >> g->adjlist[i].data;
g->adjlist[i].firstedge = nullptr;// Initial empty
}
// Create side table information
cout << " Enter coordinates \n";
for (k = 0; k < g->numEdges; k++)
{
cin >> i >> j;// Represents his coordinates , Subscript from 0 Start
EdgeNode* q = new EdgeNode;// The first interpolation , If you use the tail interpolation method, you need to cycle to find the last node
q->adjvex = j;// Storage arc head
q->next = g->adjlist[i].firstedge;// You can know how to write the head inserting method by drawing and analyzing
g->adjlist[i].firstedge = q;
// When the graph is undirected , Continue with the following operations ; The directed graph is commented out below
// Undirected graph symmetric operation <i,j>,<j,i>
EdgeNode* p = new EdgeNode;
p->adjvex = i;
p->next = g->adjlist[j].firstedge;
g->adjlist[j].firstedge = p;
}
}
void DFS(GraphAdjList g, int *visited,int adjvex)
{
if (!g)
return;
visited[adjvex] = 1;
cout << g->adjlist[adjvex].data;
EdgeNode* p = g->adjlist[adjvex].firstedge;// Get the current vertex pointer
while (p)
{
if (!visited[p->adjvex])// Recursion without access
DFS(g,visited, p->adjvex);
p = p->next;// Otherwise, go to the next adjacent path
}
}
void DFSGraphAdjList(GraphAdjList g)
{
int *visited = new int[g->numVertexes];
for (int i = 0; i < g->numVertexes; i++)// initialization
visited[i] = 0;
for (int i = 0; i < g->numVertexes; i++)// Both connected and disconnected graphs can access
if (!visited[i])
DFS(g, visited, i);
}
void BFS(GraphAdjList g, int* visited,int adjvex)
{
if (!g)
return;
int queue[MAX], front=-1, rear=-1;// Construct a circular queue
cout << g->adjlist[adjvex].data;
visited[adjvex] = 1;
rear = (++rear) % MAX;// If you go out and join the team, you should add yourself first 1 Modulus array maximum , Make the most of space
queue[rear] = adjvex;
while (front != rear)// The queue is not empty
{
front = (++front) % MAX;// Leave the team to save
int temp = queue[front];
EdgeNode* q = g->adjlist[temp].firstedge;// Get the current vertex pointer
while (q)// Non space-time cycle
{
if (!visited[q->adjvex])// If not accessed
{
visited[q->adjvex] = 1;// Mark the output and then join the team
cout << g->adjlist[q->adjvex].data;
rear = (++rear) % MAX;
queue[rear] = q->adjvex;
}
q = q->next;// Otherwise, go to the next adjacent path
}
}
}
void BFSGraphAdjList(GraphAdjList g)
{
int* visited = new int[g->numVertexes];
for (int i = 0; i < g->numVertexes; i++)// initialization
visited[i] = 0;
for (int i = 0; i < g->numVertexes; i++)// Both connected and disconnected graphs can access
if (!visited[i])
BFS(g, visited, i);
}
// Output the information of adjacency table
void printf_adjlist(GraphAdjList g)
{
EdgeNode* q;
for (int i = 0; i < g->numVertexes; i++) {
q = g->adjlist[i].firstedge;// Point to the head node
while (q) {
cout << "<" << g->adjlist[i].data << "," << g->adjlist[q->adjvex].data << ">";
q = q->next;
}
}
}
int main( )
{
GraphAdjList g;
creat(g);
printf_adjlist(g);
cout << "\nDFS:";
DFSGraphAdjList(g);
cout << "\nBFS:";
BFSGraphAdjList(g);
return 0;
}
Test data
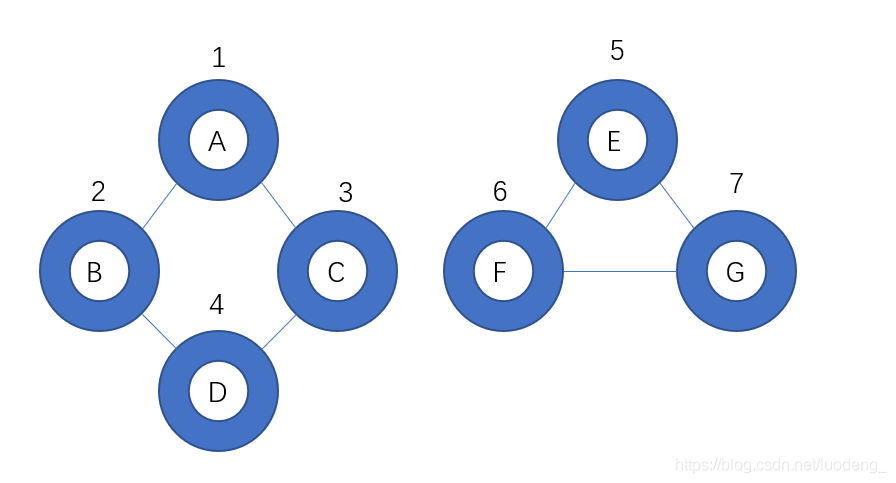 Subscript from 0 Start , The mark in the figure is neglected
Subscript from 0 Start , The mark in the figure is neglected 
边栏推荐
- Jenkins plug-in development - provide external access interface
- IDEA2020打开Run Dashboard
- Projet d'intégration du cadre SSM
- FL Studio 20.9 Chinese patch package for fruit composition software
- NIO之Channel详解
- Principle analysis of Nacos configuration center
- Idea2020 open run dashboard
- forms表单验证
- 整合ssm框架的项目
- From March to June, after summary, more than 200 pages of true question notes and detailed explanations (including core test sites and 6 major factories)
猜你喜欢

Data consistency of Nacos registry cluster

One of the problems to solve the sorting order error of Oracle database query single table
![[3D modeling] SolidWorks 3D modeling and prusaslicer slice printing learning notes](/img/c7/a7f72a0a8193ebcea084d36ac69d81.png)
[3D modeling] SolidWorks 3D modeling and prusaslicer slice printing learning notes
mysql/sql server通过JDBC连接数据库进行增删改查的步骤

PyTorch基础模块和实践

Quartz create scheduled tasks (getting started)
整合ssm框架的項目

1451 - cannot delete or update a parent row has multiple foreign key constraints to delete the data rows of the sub table

Initializing libiomp5.dylib, but found libomp.dylib already initialized
Paper reading (61):multi instance attention network for few shot learning
随机推荐
猫狗图片资源
MinIO详解
【3D建模】Solidworks 3D建模及PrusaSlicer切片打印学习笔记
基于GeoServer开发的地理场景可视化系统
Object copying tool class (fastjson)
FL Studio 20.9 Chinese patch package for fruit composition software
Web.Config自定义类的读取
Bert原理概述
中文维基语料训练获取
forms表单验证
基于STM32F407的摄像头(不带FIFO的OV7670)图像采集及LCD显示实验-笔记整理
Single project - Ruiji takeout
Initializing libiomp5.dylib, but found libomp.dylib already initialized
【ol-cesium】OpenLayers与Cesium的二三维联动
汇编借助于条件转移实现循环判断是否为平方数
In fastjason data type, there is a problem of $ref: "$.list[0]" when parsing jsonobject
原子引用解决ABA问题
Analysis of Nacos registry principle
【记录】Optisystem运行卡死,无法点击关闭、输入变量数值等问题解决方法
M进制转换为N进制