当前位置:网站首页>从一个点云中提取一个子集
从一个点云中提取一个子集
2022-07-21 05:04:00 【Amelie_11】
6.2.5 从一个点云中提取一个子集
代码:书中第六章例五
修改两个代码:
//sensor_msgs::PointCloud2::Ptr cloud_blob(new sensor_msgs::PointCloud2), cloud_filtered_blob(new sensor_msgs::PointCloud2);
//以上的是旧的方式,要改为
pcl::PCLPointCloud2::Ptr cloud_blob(new pcl::PCLPointCloud2), cloud_filtered_blob(new pcl::PCLPointCloud2);
//pcl::fromROSMsg(*cloud_filtered_blob, *cloud_filtered);
//改为:
pcl::fromPCLPointCloud2(*cloud_filtered_blob, *cloud_filtered);
修改后的完整代码:
#include <iostream>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/extract_indices.h>
int
main(int argc, char** argv)
{
//sensor_msgs::PointCloud2::Ptr cloud_blob(new sensor_msgs::PointCloud2), cloud_filtered_blob(new sensor_msgs::PointCloud2);
pcl::PCLPointCloud2::Ptr cloud_blob(new pcl::PCLPointCloud2), cloud_filtered_blob(new pcl::PCLPointCloud2);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>), cloud_p(new pcl::PointCloud<pcl::PointXYZ>), cloud_f(new pcl::PointCloud<pcl::PointXYZ>);
// 填入点云数据
pcl::PCDReader reader;
reader.read("C:\\Users\\oh_clm\\Desktop\\点云库PCL从入门到精通\\第六章\\5 extract_indices\\source\\table_scene_lms400.pcd", *cloud_blob);
std::cerr << "PointCloud before filtering: " << cloud_blob->width * cloud_blob->height << " data points." << std::endl;
// 创建滤波器对象:使用叶大小为1cm的下采样
pcl::VoxelGrid<pcl::PCLPointCloud2> sor;//体素栅格下采样对象
sor.setInputCloud(cloud_blob);//设置下采样原始点云数据
sor.setLeafSize(0.01f, 0.01f, 0.01f);//设置采样的提速大小
sor.filter(*cloud_filtered_blob);//执行采样保存数据
// 转化为模板点云
//pcl::fromROSMsg(*cloud_filtered_blob, *cloud_filtered);
pcl::fromPCLPointCloud2(*cloud_filtered_blob, *cloud_filtered);
std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height << " data points." << std::endl;
// 将下采样后的数据存入磁盘
pcl::PCDWriter writer;
writer.write<pcl::PointXYZ>("C:\\Users\\oh_clm\\Desktop\\点云库PCL从入门到精通\\第六章\\5 extract_indices\\source\\table_scene_lms400_downsampled.pcd", *cloud_filtered, false);
/*处理参数化分割*/
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
pcl::PointIndices::Ptr inliers(new pcl::PointIndices());
// 创建分割对象
pcl::SACSegmentation<pcl::PointXYZ> seg;
// 可选
seg.setOptimizeCoefficients(true);//设置对估计的模型参数进行优化处理
// 必选
seg.setModelType(pcl::SACMODEL_PLANE);//设置分割模型类别
seg.setMethodType(pcl::SAC_RANSAC);//设置用哪个随机参数估计方法
seg.setMaxIterations(1000);//设置最大迭代次数
seg.setDistanceThreshold(0.01);//判断是否为模型内点的距离阈值
// 创建滤波器对象
pcl::ExtractIndices<pcl::PointXYZ> extract;
int i = 0, nr_points = (int)cloud_filtered->points.size();
// 当还有30%原始点云数据时
while (cloud_filtered->points.size() > 0.3 * nr_points)
{
// 从余下的点云中分割最大平面组成部分
seg.setInputCloud(cloud_filtered);
seg.segment(*inliers, *coefficients);
if (inliers->indices.size() == 0)
{
std::cerr << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
// 分离内层
extract.setInputCloud(cloud_filtered);//设置输入点云
extract.setIndices(inliers);//分割后的内点为需要提取的点集
extract.setNegative(false);//提取内点 而非外点
extract.filter(*cloud_p);//提取输出存储到cloud_p
std::cerr << "PointCloud representing the planar component: " << cloud_p->width * cloud_p->height << " data points." << std::endl;
std::stringstream ss;
ss << "table_scene_lms400_plane_" << i << ".pcd";
writer.write<pcl::PointXYZ>(ss.str(), *cloud_p, false);
// 创建滤波器对象
extract.setNegative(true);
extract.filter(*cloud_f);
cloud_filtered.swap(cloud_f);
i++;
}
return (0);
}
运行结果:
原始点云:
下采样后的点云
分割后的点云
边栏推荐
猜你喜欢

As7341 spectrum sensor measures color temperature color_ temperature_ Study notes

Those pits in distributed transactions

Esp8266 firmware download and burning (include at firmware download address + firmware burning precautions)
5. Paddlepaddle 10 lines of code deep learning image classification (cifar)
![[PCB] Based on Hetai ht32f52352 chip circuit board drawing experiment (WiFi and optical sensor module) - drawing board notes](/img/e5/0656ae81855e99803916e7cfe70caa.png)
[PCB] Based on Hetai ht32f52352 chip circuit board drawing experiment (WiFi and optical sensor module) - drawing board notes
UNET reproduction and environment configuration (including dataset)
![[3D modeling] SolidWorks 3D modeling and prusaslicer slice printing learning notes](/img/c7/a7f72a0a8193ebcea084d36ac69d81.png)
[3D modeling] SolidWorks 3D modeling and prusaslicer slice printing learning notes

STM32F407-OV7670(无FIFO)-ONENET-实现摄像头画面上传到onenet(EDP协议)
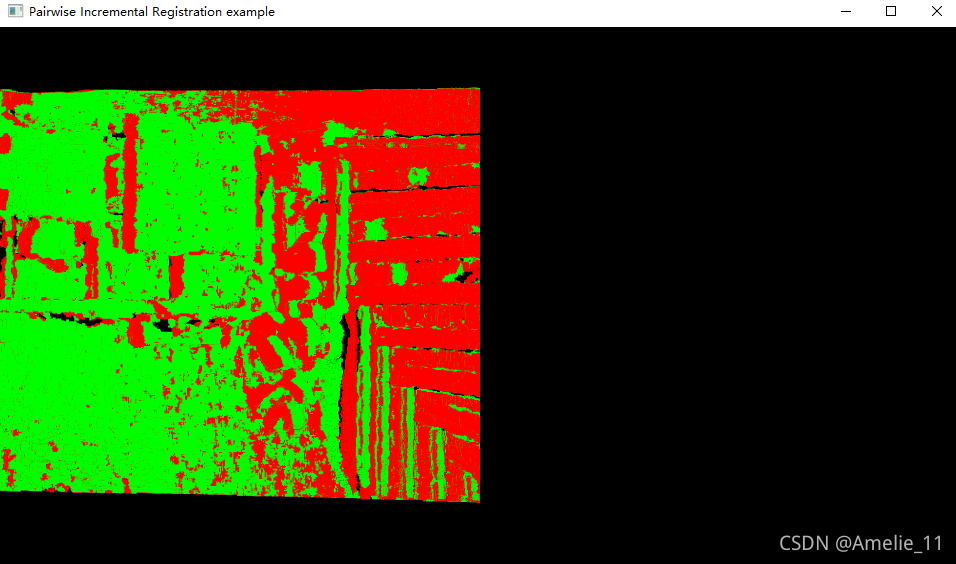
如何逐步匹配多幅点云

【PCB】基於STM32F103RCT6搖杆-藍牙模塊開發板-畫板筆記整理
随机推荐
吴恩达深度学习L4W4人脸识别
1014 Holmes date
Printf explanation - what you don't know about the usage of printf
(好数对)一个数组的值赋给另一个数组
learning opencv3_2-11_写入AVI文件
Hetai 32 onenet WiFi module - Hetai MCU data cloud through mqtt protocol (I)
Mask RCNN loading weight error
(environment configuration) TDD net
我的第一篇博客
5. Paddlepaddle 10 lines of code deep learning image classification (cifar)
深度剖析 string —— strlen & strtok
D. Insert a Progression(数学)
1027打印沙漏
Pycharm common errors collection
1014 Sherlock Holmes date
4. 10 lines of code MNIST handwritten numeral recognition of paddlepaddle
MMdetection环境搭配(cuda10.1+mmdet2.24)
Pytorch installation
合泰32-Onenet-WiFi模块-合泰单片机通过MQTT协议数据上云(二)
深度剖析 string —— strcmp & strncmp