当前位置:网站首页>Xilinx Mipi csi-2 receiver subsystem IP details
Xilinx Mipi csi-2 receiver subsystem IP details
2022-07-21 10:44:00 【A programmer who gets up early】
Catalog
1.MIPI CSI-2 Receiver Subsystem IP framework
2.MIPI CSI-2 Receiver Core details
2.6.1 Width of video output port
2.6.2 Pixels of various data types are packed
2.6.3 Embedded non image data type pixel packaging
2.6.4 Pixel packaging when the video format bridge does not exist
4.3 MIPI CSI-2 RX Controller Delay
4.4 Video suitable bridge (VFB) Delay
4.5 CSI2 RX Total number of subsystem delay clocks
5.2 When there is a video format bridge AXI4 Streaming video interface
5.3 When selecting embedded non image interface AXI4 Stream interface
5.4 When the video format bridge does not exist AXI4 Stream interface
1.MIPI CSI-2 Receiver Subsystem IP framework

2.MIPI CSI-2 Receiver Core details
2.1 MIPI D-PHY
To put it bluntly, it is realized MIPI Physical interface layer .MIPI D-PHY Implemented a D-PHY RX Interface , And provided with CSI-2 Compatible physical protocol layer support . When the link rate is greater than 1.5Gb/s when ,MIPI D-PHY Support jitter mode detection . You can see PG202 Learn more .
 https://blog.csdn.net/weiaipan1314/article/details/125756016?spm=1001.2014.3001.5501
https://blog.csdn.net/weiaipan1314/article/details/125756016?spm=1001.2014.3001.55012.2 MIPI CSI-2 RX Controller
MIPI CSI-2 RX The controller consists of MIPI CSI-2 RX1.1 It consists of multiple levels defined in the specification , Such as channel management 、LLP layer 、 Byte to pixel conversion layer , To put it bluntly, it is realized MIPI Of CSI-2 agreement .
MIPI CSI-2 RX The controller core passes PPI from MIPI D-PHY The core receives 8 Bit data , Most support 4 Channels . As shown in the figure below ,PPI(Physical protocol interface) The byte data received on is then processed by the low-level protocol module , To extract real image information . Use of the final extracted image AXI4 Streaming protocols are provided to users / Processor interface . The channel management block is always starting from PPI Received 32 Run on bit data , It has nothing to do with the number of channels .

(1)1-4 Lane support , Registers support the selection of multiple channels ;
(2) Support all short packets and long packets ;
(3) Support primary and multiple secondary video formats ;
(4) data type (DT) staggered ;
(5) Virtual channel identifier (VC) staggered ;
(6) Data types and virtual channels are interleaved ;
(7) baotou 1bit Error correction code and 2bit Error detection ;
(8) Data load support CRC To verify ;
(9) For downstream IPs Long bag ECC/CRC Forwarding capability ;
(10) single lane Maximum support 2.5Gb/s The data rate of ;
(11) Pixel byte packaging based on data format ;
(12)AXI4-Lite Interface accesses core registers ;
(13) Low power state detection ;
(14) Error detection (D-PHY Level error 、 Packet level error 、 Protocol decoding level error );
(15) Provide interrupt support , Support internal status and error messages ;
As shown in the table below , Embedded non image ( The data type code is 0x12)AXI4 The data width of the stream interface is selected according to the selected data type . Embedded non image AXI4- The width of the stream interface increases with IP The width of the selected data type may be different .

2.3 ECC/CRC Forwarding
AXI4 Sideband signal of stream interface [ Include / It does not include video format bridges and embedded non image interfaces ] Will be from source [ sensor ] Received ECC and CRC Data is reported to downstream IP. This allows downstream IP Recalculate in some functional safety applications ECC/CRC.
In the wrong scenario , Such as sudden termination due to soft reset 、 Disable the core during packet transmission 、 The line buffer is full 、 The number of words in the received packet is greater than the actual payload , These sideband signals will not report correctly ECC and CRC.
2.4 VCX Support
MIPI CSI-2 standard v2.0 given VCX The support function is used to expand the maximum number of available virtual channels to 16 individual . When this feature is enabled , By combining 2 position VC Field (LSB) and 2 position VCX Field (MSB) To derive the virtual channel .
2.5 AXI Crossbar
Used in subsystems AXI Crossbar According to the address, the core will AXI4 Lite The request is routed to the corresponding sub core .
2.6 Video Format Bridge
The video format bridge core uses the user selected VC And data type information , Filter out only what you need AXI4 Stream data . The AXI4 Stream data is further processed based on data type information , The output is based on the number of pixels requested per shot .
The core processing of video format bridging is Vivado Integrated design environment (IDE) Data type selected in , And filter out from CSI-2 RX The received by the controller is based on RAW8 and Based on user definition data type (0x30-0x37) outside All other data types .
No matter Vivado IDE How about your choice ,RAW8 and Based on user definition The data type of is always handled by the video format Bridge Core . This allows multiple data types to support , Pixel data support comes from Vivado IDE A kind of The main data type , Metadata supports byte based data types defined by users . When transferring multiple data types ( for example ,RAW10 And based on user-defined data types ) when , The real pixel data is AXI4 Flow is defined .
For misaligned transfers , Not according to the TKEEP The signal specifies part of the final output for the output interface .
2.6.1 Width of video output port
video_out The width of the data port in the interface depends on the selected data type and the selected number of pixels per beat . Width is RAW8 and Vivado IDE The number of pixels per beat multiplied by the data type selected in Maximum . And then according to AXI4 The flow protocol rounds it to the nearest byte The border .
give an example 1: choice RAW10、 Each clock outputs 2 Pixel
- Single pixel width of RAW10 = 10bit
- Single pixel width of RAW8 = 8bit
For each clock, select two pixels ,RAW10 and RAW8 The effective pixel widths of are 20 and 16. The width of the video output port is configured as the maximum width of a single pixel , And round to the nearest byte boundary . This results in a video output port width of 24.
give an example 2: choice RAW7、 Each clock outputs 4 Pixel
- Single pixel width of RAW7 = 7bit
- Single pixel width of RAW8 = 8bit
For each clock, select two pixels ,RAW7 and RAW8 The effective pixel widths of are 28 and 32. The width of the video output port is configured as the maximum width of a single pixel , And round to the nearest byte boundary . This results in a video output port width of 32.
2.6.2 Pixels of various data types are packed
When transmitting multiple pixels with different pixel widths , Pixels with lower width Align to the most significant digit .

 2.6.3 Embedded non image data type pixel packaging
2.6.3 Embedded non image data type pixel packaging
AXI4 flow TDATA The width is based on from VivadoIDE Main data types selected in . This lists the embedded non image data type bytes in emb_nonimg_tdata Position on .
2.6.4 Pixel packaging when the video format bridge does not exist
The width of data port in video output can be from Vivado IDE Medium CSI-2 Options TDATA width Choose . When there is no video format bridge ,MIPI CSI-2 The receiving subsystem follows MIPI CSI-2 Standard recommended memory storage format output pixels , At this time, you need to check mipi CSI-2 Specification document for .
Examples of different data types are as follows :
 2.7 AXI IIC
2.7 AXI IIC
MIPI CSI-2 Standard camera control interface (CCI) with 400 kHz Operation and 7 Bits from addressable I2C The quick mode variant of the interface is compatible . According to the user's choice ,AXI IIC Can be part of this subsystem .
3. MIPI CSI-2 RX application
Xilinx MIPI CSI-2 RX The controller realizes the camera serial interface between the camera sensor and the programmable device that performs baseband processing . Due to the development of high-resolution cameras , The camera - The bandwidth demand of sensor interface increases . Traditional parallel interfaces require more and more signal lines , This leads to higher power consumption . New high-speed serial interface , Such as MIPI CSI standard , These expanding bandwidth requirements can be met without sacrificing power consumption .MIPI It is a group of agreements defined by the mobile industry group , For standardizing mobile platforms ( Such as mobile phones and tablets ) All interfaces in . However , The huge capacity and economies of scale of the mobile industry force other applications to adopt these Standards . therefore , be based on MIPI Camera sensors are increasingly used in driver assistance technology in automotive applications 、 Video security surveillance camera 、 Video conferencing and emerging applications such as virtual reality and augmented reality .
4. performance
This section details the performance information of various core configurations .
4.1 CSI2 RX Subsystem delay
CSI2 RX The core delay of subsystem is from Transmission on the serial line begins (SoT) Behavior To CSI-2 RX Subsystem output tvalid Signal assertion Time for . This includes D-PHY Delay 、MIPI RX Controller delay and VFB Delay ( If the subsystem includes a video format bridge ).

4.2 D-PHY Delay
MIPI D-PHY RX The core delay starts from the transmission on the serial line (SoT) Behavior to PPI Upper activehs Time of signal assertion .HS_SETTLE The cycle is D-PHY Delay calculation plays an important role . The following figure provides various configurations D-PHY Delay of rxbyteclk The number of clocks .

4.3 MIPI CSI-2 RX Controller Delay
MIPI CSI-2 RX The controller core delay is from PPI On the interface activehs Assertion To control Valid signal assertion on the controller output Time for . The following figure provides various configurations MIPI CSI-2 RX Controller Delay of rxbyteclk The number of clocks .

4.4 Video suitable bridge (VFB) Delay
VFB The core delay is from VFB Input stream interface “tvalid” To VFB Output stream interface “tvalid” Time for . The following figure provides various configurations VFB Delay of rxbyteclk The number of clocks .

4.5 CSI2 RX Total number of subsystem delay clocks
The delay time can be improved by increasing the number of link channels .

5. Interface
5.1 Clock and reset
dphy_clk_200M:D-PHY The clock of , It has to be for 200MHz;
video_aclk: Provide core clock for all cores of subsystem ,7 The maximum size of the series is 175MHz,UltraScale+ The maximum is 250MHz, At this time, the clock frequency should be greater than or equal to lite_aclk clock frequency .


5.2 When there is a video format bridge AXI4 Streaming video interface

5.3 When selecting embedded non image interface AXI4 Stream interface
and 5.2 Agreement , Just a clock emb_nonimg_ Interface for output .
5.4 When the video format bridge does not exist AXI4 Stream interface
and 5.2 Agreement .
5.5 Other interfaces
| The signal | Input and output | describe |
csirxss_csi_irq | Output | come from CSI-2 RX Controller Interrupt ( High active ) |
csirxss_iic_irq | Output | come from AXI IIC The interrupt ( High active ) |
mipi_dphy_if | Input | DPHY Interface |
rxbyteclkhs | Output | PPI High speed receive byte clock |
dlyctrl_rdy_out | Output | IDEALYCTRL Ready signal output , The delay value depends on vtc Change to adjust |
6. Register space
adopt axi_lite Interface can access MIPI CSI-2 RX controller 、IIC controller 、MIPI D-PHY All internal core components .
When AXI IIC When the core does not exist ,MIPI D-PHY Offset moves up and away from 0x1_0000 Start . Software drivers can deal with this problem seamlessly .

1. Some of the materials in this article come from the network , The copyright belongs to the original author , If involves the work copyright question , Please contact me to delete .
2. No reprint of this article without the permission of the original author , Otherwise, it will be regarded as infringement ;
3. Please indicate the source and original author of this article ;
4. For those who do not comply with this statement or use the contents of this article illegally , I reserve the right to investigate according to law .
Below is my personal WeChat official account. , Focus on 【 An early programmer 】 Wonderful series of articles continue every day .

边栏推荐
- HIDE & SEEK 介紹 -- 端到端的模擬和處理無線電觀測數據(二)
- Xilinx MIPI CSI-2 Receiver Subsystem IP详解
- 【STM32】中断(NVIC)
- [论文速度] 同时解决成像时,曝光不足和曝光过度问题:Deep Reciprocating HDR Transformation
- 详细解读numpy中transpose()函数(附带实例帮助理解)
- User experience | deeply cultivate user experience and build a moat for bank competition
- WP 微信导出聊天记录备份到电脑
- ON-LSTM介绍
- Huawei cloud: serve everything, build a whole scene of smart Finance
- flv. JS' live broadcast optimization scheme of frame tracking, disconnection and reconnection and real-time update
猜你喜欢
![[STM32] interrupt (NVIC)](/img/c1/2258430e0dfc3f21c5c04942b3d178.png)
[STM32] interrupt (NVIC)

在VB6 处理pdf 和jpg文件

生成任意边缘平滑形状(斑块)神器

重庆交通大学2021级程序设计方法及在线实践考试题解

效率提升98%!高海拔光伏电站运维巡检背后的AI利器

用户体验 | 深耕用户体验筑造银行竞争的护城河

A quick review of flex properties and usage
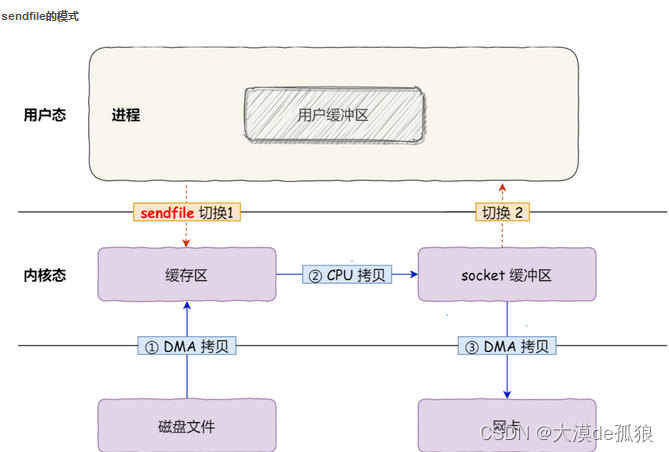
文件映射(mmap)和sendfile和零copy之间的联系和区别
![[neurips 2021] tokenlearner: number and location of adaptive learning tokens - what can 8 learned tokens do for images and videos?](/img/81/4afc5e565a960999a15cebf4cfd8c8.png)
[neurips 2021] tokenlearner: number and location of adaptive learning tokens - what can 8 learned tokens do for images and videos?

4 个简单操作,实现 CPU 轻量级网络 ---- PP-LCNet: A Lightweight CPU Convolutional Neural Network
随机推荐
阿里云Web应用防火墙与CDN如何配置
flask初体验
Quick reading of the paper: axial deeplab: stand alone axial attention for panoramic segmentation
又一个轻量级 ViT:Lite Vision Transformer with Enhanced Self-Attention
Another lightweight vit:lite vision transformer with enhanced self attention
重磅预告!易观分析联合微软、中央财经大学,共话数字经济
flv.js的追帧、断流重连及实时更新的直播优化方案
NVIDIA Inspector 详细使用说明书
Acwing第 60 场周赛【完结】
学会这些Jmeter插件,才能设计出复杂性能测试场景
Machine learning - detailed derivation of support vector machine theory (including explanation of examples) (I)
MATLAB 生成随机数 方法总汇 (各分布配图参考)
HIDE & SEEK 介绍 -- 端到端的模拟和处理无线电观测数据(一)
两个库都有MD5.h,重定义或无法解析的外部符号,得删除一个。获取串口列表,自动获取串口号
[STM32] interrupt (NVIC)
文件映射(mmap)和sendfile和零copy之间的联系和区别
The seemingly simple input box input is abnormally stuck. Remember a troubleshooting idea for daily performance problems
Kalman filter meets deep learning: papers related to Kalman filter and deep learning
ON-LSTM介绍
mysql 常用基础命令